



NSI and Kalman Filter Toolbox
Please note that the INS Toolbox and SatNav Toolbox are required for use of this toolbox
Technical support is not available for GPSoft software packages
Version 2.0 of GPSoft’s Navigation System Integration and Kalman Filter Toolbox for MATLAB expands upon the previous version by providing enhanced covariance and observability analysis. Integration examples with sensor correction feedback are also provided.
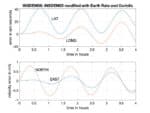
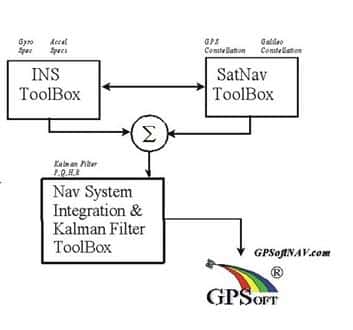
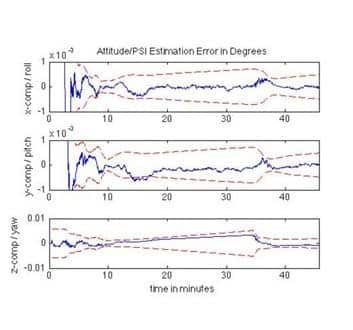
Highlights of the toolbox include GPS stand-alone 8-state and 11-state extended Kalman filters, state-space inertial error modeling, loosely-coupled GPS/INS Kalman filter integration and tightly-coupled GPS/INS Kalman filter integration.
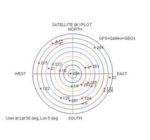
The Navigation System Integration and Kalman Filter Toolbox provides a variety of functions and examples for users to perform both loose and tightly-coupled integration of inertial navigation systems (INS) with satellite-based navigation systems such as GPS. The toolbox also provides examples of stand-alone GPS Kalman filter architectures.
The NSI and Kalman Filter Toolbox includes a complete software manual.
- Open architecture
- All functions can be edited and modified by the user
- Extensive user manual included
- Numerous example programs included
- 1 year of tech support included through GPSoft
For examples of stand-alone Kalman filter architectures, please see the “Examples” tab above.